ふと秋月のWebサイトをみていたら、ESP-WROOM-32が発売になっていました。早速、秋月へ行ってゲットしてきました。
で、とにかく動かしてみます。すでに先達もいるようなので、参考にさせてもらいながら、なるべく手抜きして動かします。開発環境はESP-WROOM-02の時と同様にArduinoで動かします。
使用した部品
使用した部品は以下の通りです。
- ESP-WROOM-32
まずこれがないと、ですね。
- FT-232RQ USBシリアル変換キット
最近のお気に入りのUSBシリアル変換基板です。Linuxでも安定して動作するのでGoodです。
- NJU7223DL1
3.3Vのレギュレータです。データシートの回路図だと入出力のコンデンサが小さくて済みそうなので、選びました。
- 0.1uF 1608 チップコンデンサ✕3
三端子レギュレータの入出力に各1個、USBシリアルのRTS端子とEN端子の間に1個
- 22uF 1608 チップコンデンサ✕1
ESP-WROOM-32の資料では電源入力に10uFが付いているので、手持ちの22uFのチップコンを使用
- 10kΩ 1608 チップ抵抗✕2
1個はEN端子のプルアップ、もう1個はIO0端子のプルアップ
- 0.022uF 1608 チップコンデンサ✕1
EN端子の入力とGND間に接続
- 適当なタクトSW✕1
IO0端子をGNDに落としてダウンロードモードに移行させるのに使います
- ユニバーサルプリント基板
これを使いました。最近は軽量化を目指して薄めの基板を使ってます。この基板は両面なのですが、内面がスルーホール処理されていないので表裏の接続ができていない箇所があってハマリました。
- その他
適当なピンヘッダ・ピンソケット、ポリウレタン被覆線、スズメッキ線
ハードウェアの組み立て
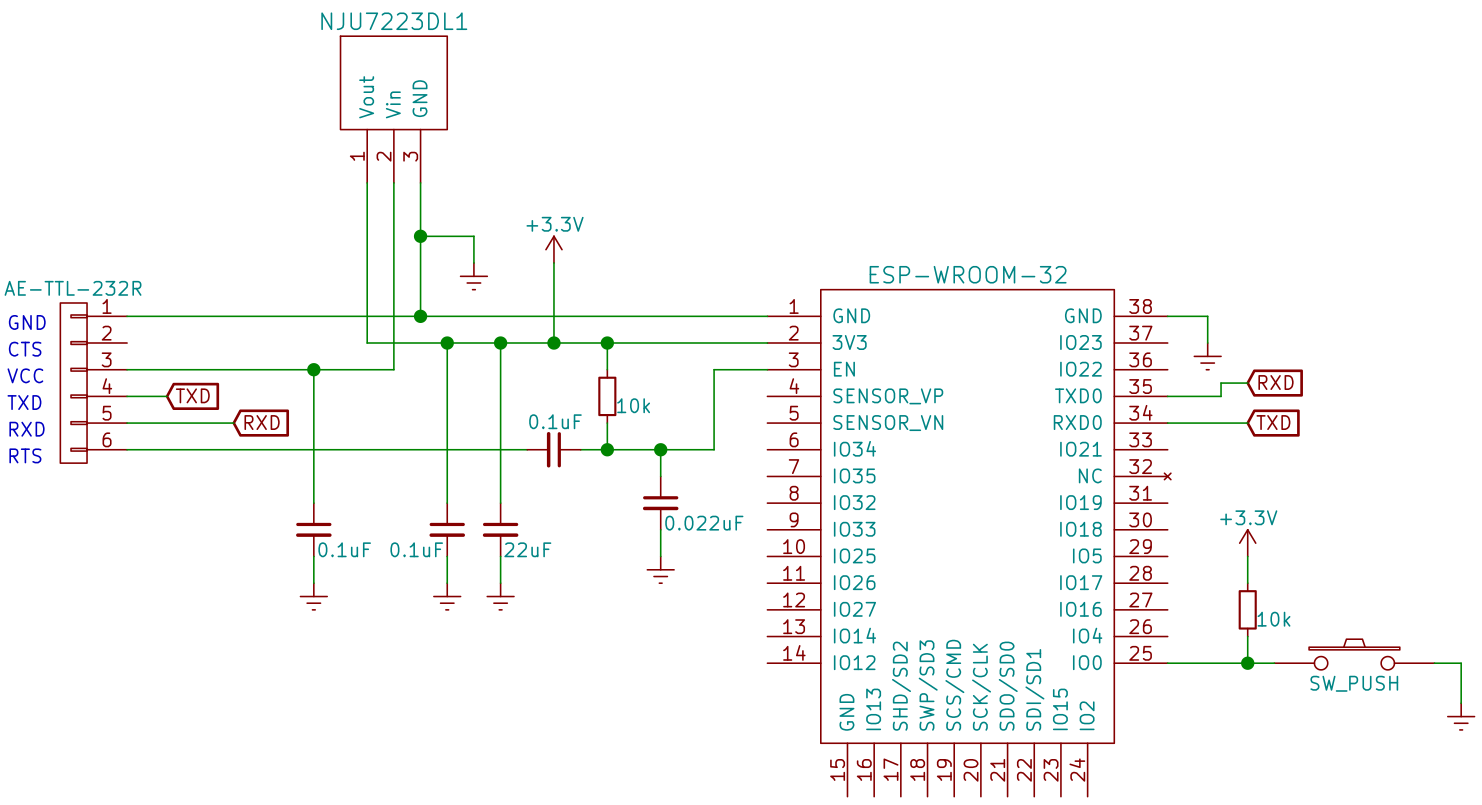
こちらの回路を参考に手抜きして作りました。
- GND端子はUSBシリアル基板のGNDに接続
- 3V3端子は三端子レギュレータの出力端子に接続
- EN端子は10kΩでプルアップ、GNDとの間に0.022uF、USBシリアル基板のRTS端子との間に0.1uFを接続。この0.1uFによりPC側でRTSを制御するとESP-WROOM-32側にリセットがかかります。
- IO0端子はプルアップ、および、タクトスイッチを接続して、ボタン押下でGNDに落ちるようにします。ボタンを押しながらArduino IDEで書き込み操作をすることで、書き込みモードへ移行できます。
(注:IO0のプルアップは不要らしい。タクトスイッチによるIO0のコントロールがうまく行かなかった際につけたが、外してOKかは試していない。ちなみに、タクトスイッチでIO0がコントロールできなかった原因はノンスルーホール基板を使ったので基板の表裏で接続ができてなかったため。)
- TXD0端子はUSBシリアル基板のRXDへ接続
- RXD0端子はUSBシリアル基板のTXDへ接続
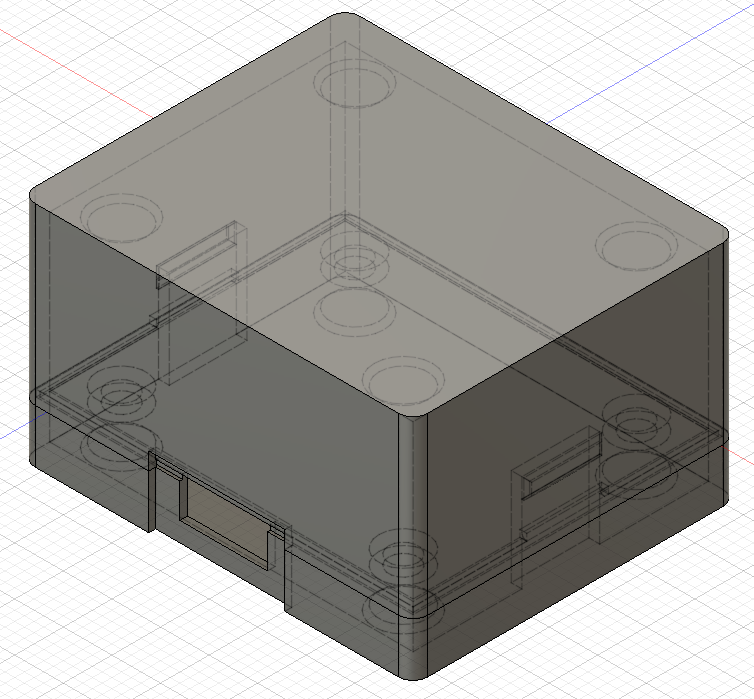
回路図はこんな感じです。15ピンのGNDは手抜きで接続していませんが、動いています。
![]()
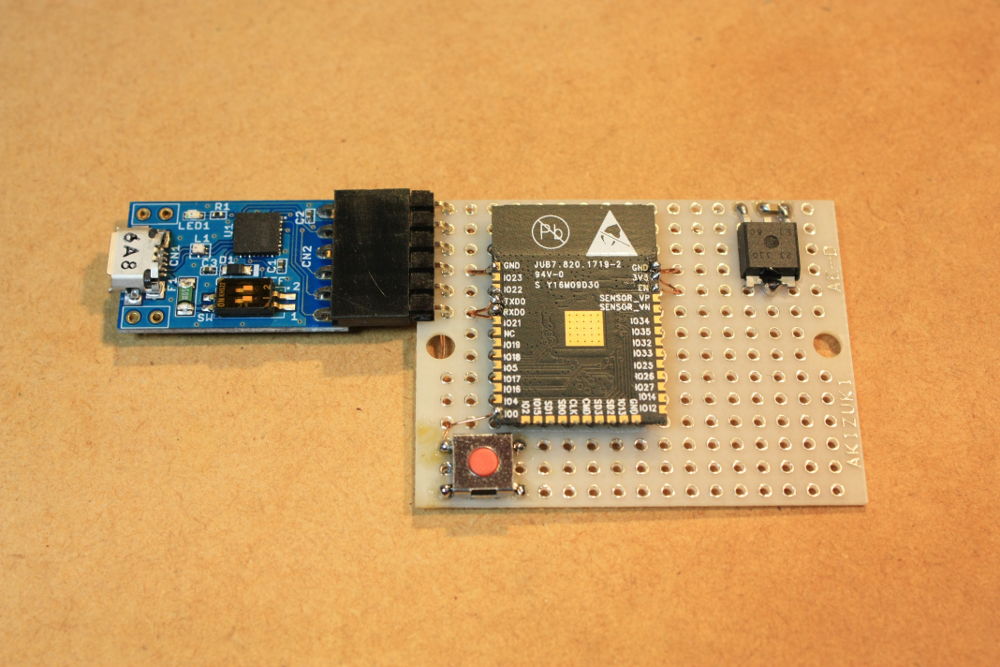
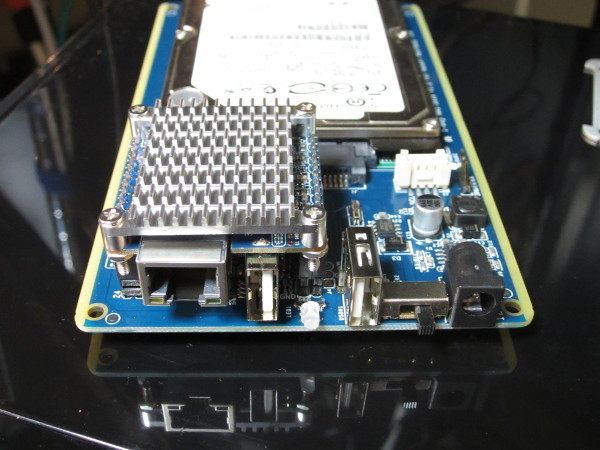
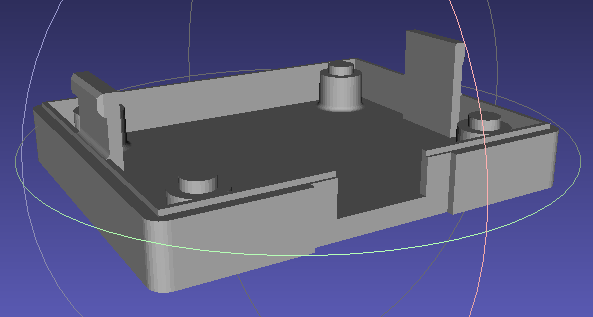
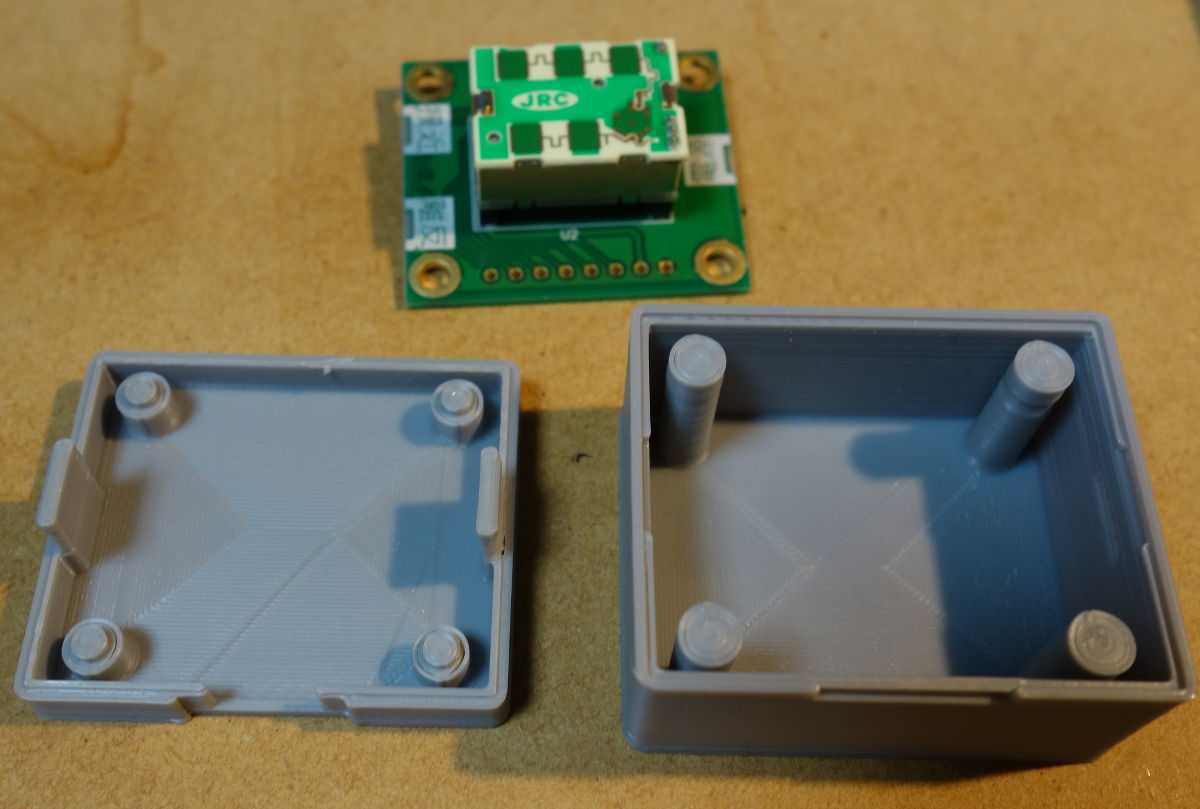
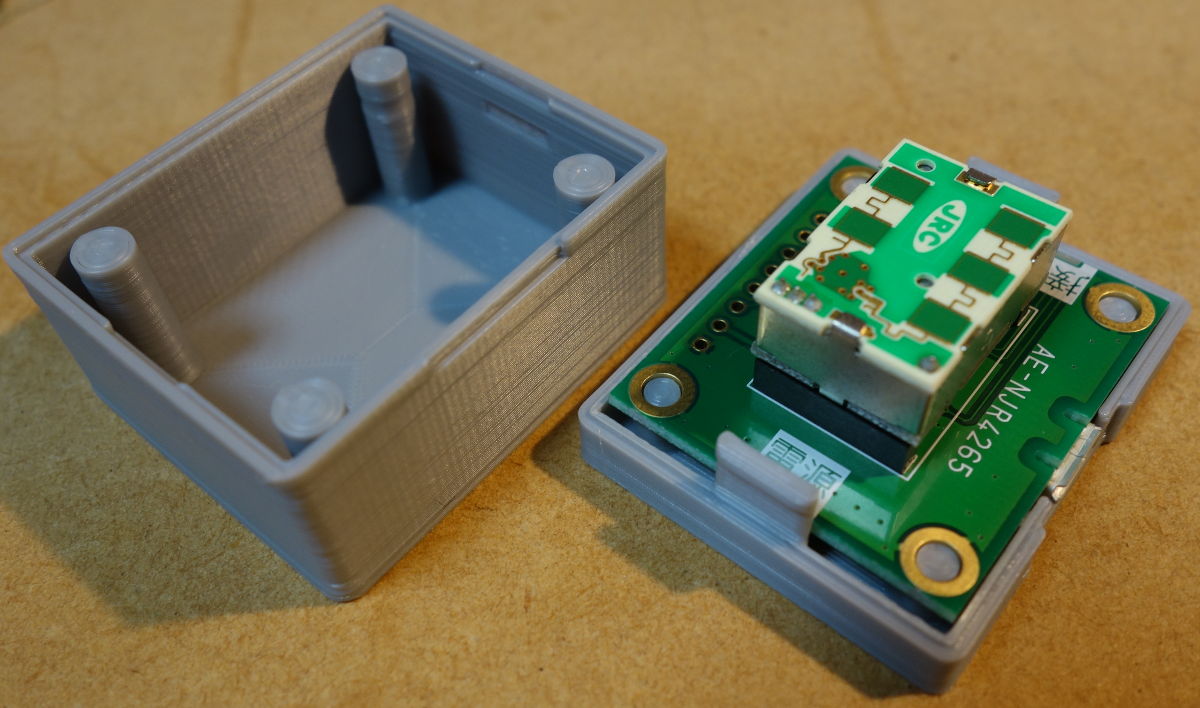
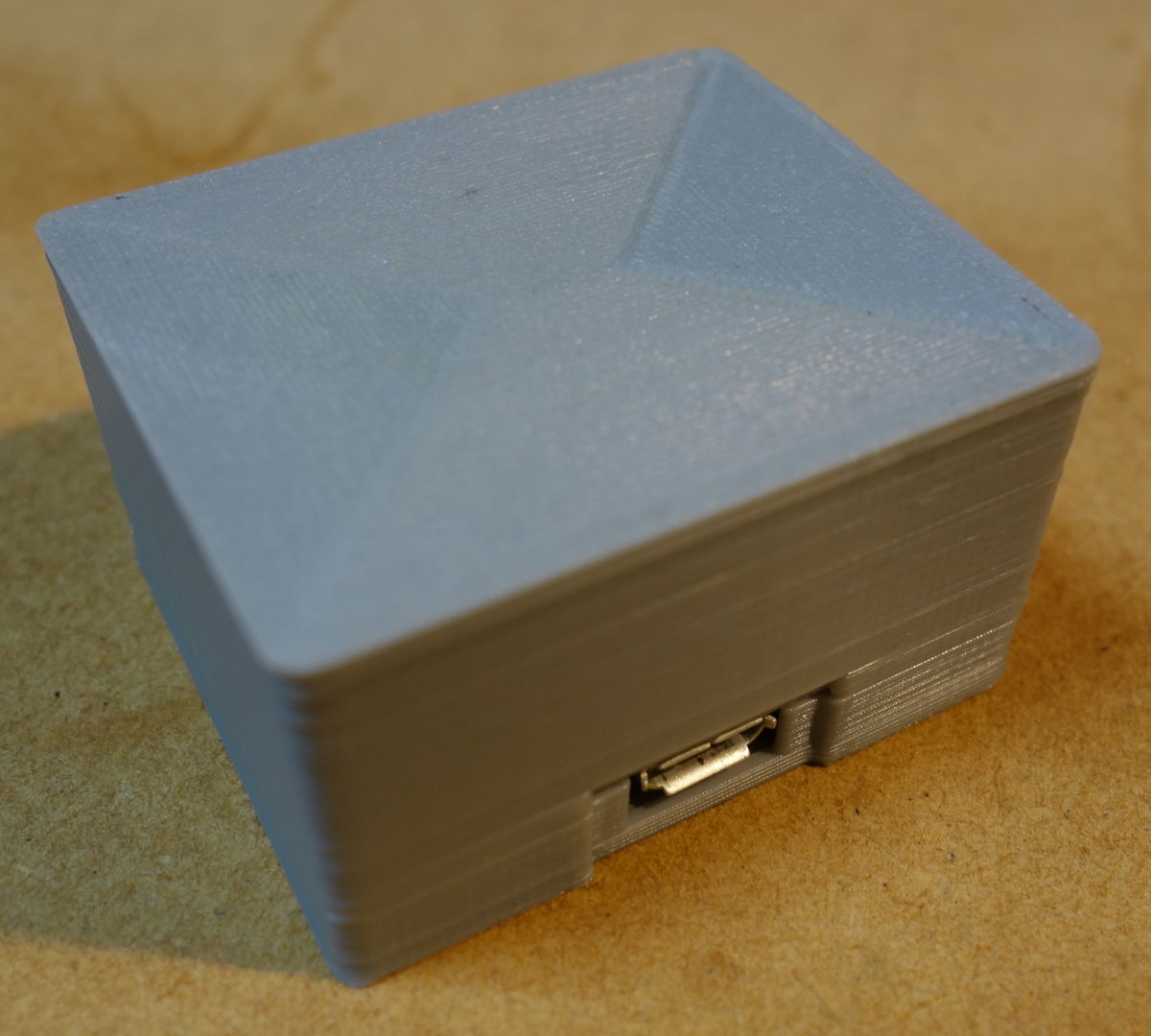
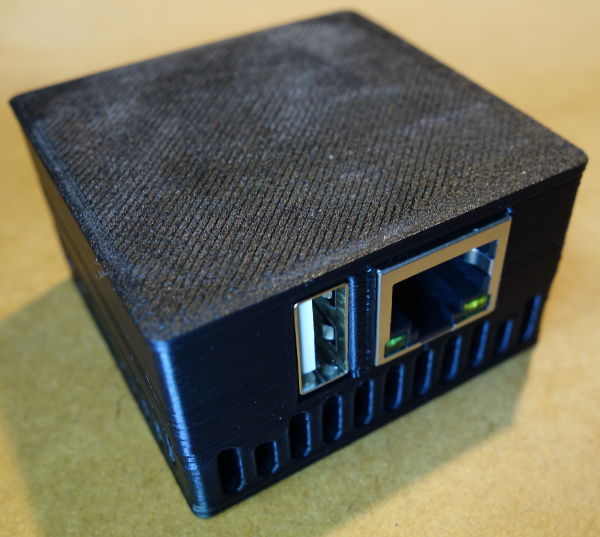
こんな感じになりました。
![]()
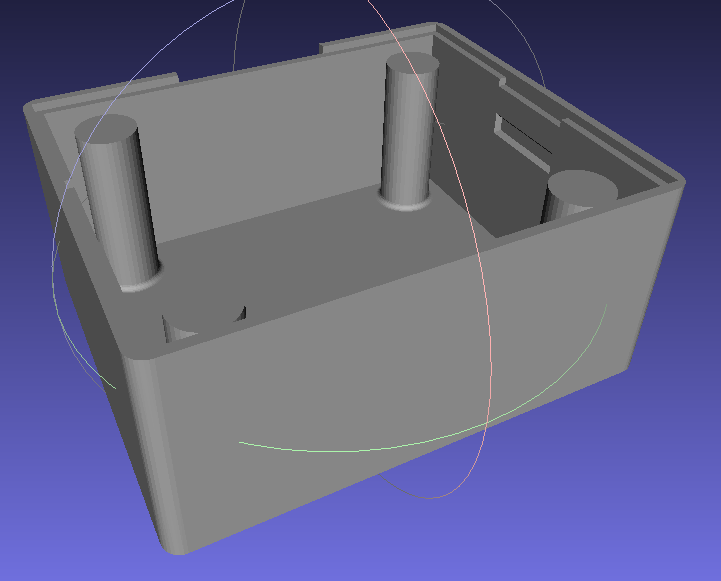
ESP-WROOM-32は裏返しに両面テープで基板に貼り付けてあります。基板を作りなおす時も多分無事に剥がせると思います。
![]()
無計画に作ったので、裏側は汚いですw。左上のレギュレータ周りがどうしようもないですね。
まずはハードウェアの動作確認
Arduinoで書き込みをする前に、ハードウェアの動作確認をしておきます。
といっても、よくよく結線を確認した後、電源を投入(USBケーブルで接続)するだけです。
電源を投入したら、スマートフォンのWiFiアナライザなどアプリケーションで、「ESP-xxxxxx」というSSIDが見えることを確認しておきます。SSIDが見えればとりあえずESP-WROOM-32はアクセスポイントとして動作しているはずです。(注:Arduino環境の構築ができていれば、Arduinoのシリアルモニタで /dev/ttyUSB* を115200bpsでモニタすればブートローダなどの表示も確認できます)
Arduino開発環境の構築
PCはLinux Mint 18の64bit版です。
まず、arduino IDE をインストールします。その前に、古いバージョンをアンインストール。
$ cd arduino-1.6.12
$ ./uninstall.sh
Removing desktop shortcut and menu item for Arduino IDE... done!
arduino.cc から最新版の arduino-IDE をダウンロード。今回ダウンロードしたファイルは arduino-1.8.1-linux64.tar.xz です。
$ cd ~
$ xzcat ダウンロード/arduino-1.8.1-linux64.tar.xz | tar xvf -
$ cd arduino-1.8.1/
$ ./install.sh
Adding desktop shortcut, menu item and file associations for Arduino IDE... done!
次に、arduino-esp32 をインストール。このページのコマンドをコピペ。
$ sudo usermod -a -G dialout $USER && \
> sudo apt-get install git && \
> mkdir -p ~/Arduino/hardware/espressif && \
> cd ~/Arduino/hardware/espressif && \
> git clone https://github.com/espressif/arduino-esp32.git esp32 && \
> cd esp32/tools/ && \
> python get.py
[sudo] xxx のパスワード:
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
git はすでに最新バージョン (1:2.7.4-0ubuntu1) です。
アップグレード: 0 個、新規インストール: 0 個、削除: 0 個、保留: 39 個。
Cloning into 'esp32'...
remote: Counting objects: 2799, done.
remote: Compressing objects: 100% (10/10), done.
remote: Total 2799 (delta 1), reused 0 (delta 0), pack-reused 2785
Receiving objects: 100% (2799/2799), 54.67 MiB | 3.44 MiB/s, done.
Resolving deltas: 100% (1152/1152), done.
Checking connectivity... done.
Checking out files: 100% (903/903), done.
System: Linux, Info: Linux-4.4.0-45-generic-x86_64-with-LinuxMint-18-sarah
Platform: x86_64-pc-linux-gnu
Downloading xtensa-esp32-elf-linux64-1.22.0-61-gab8375a-5.2.0.tar.gz
Done
Extracting xtensa-esp32-elf-linux64-1.22.0-61-gab8375a-5.2.0.tar.gz
Downloading esptool-fe69994-linux64.tar.gz
Done
Extracting esptool-fe69994-linux64.tar.gz
Done
~/Arduino/hardware/espressif/esp32/tools $
いよいよ起動します。デスクトップ上のArduino IDEのアイコンをダブルクリックして、Arduino IDEを起動。
起動したら、「ツール」→「ボード:xxx」→「ESP32 Dev Module」を選択でESP32モジュールを選択します。
サンプルを動かしてみる
次にサンプルを動かしてみます。シリアルに結果が表示されるものが良いと思うので、WiFiScanを動かしてみます。
「ファイル」→「スケッチ例」→ESP32 Dev Module用のスケッチ例の下の「WiFi」→「WiFiScan」選択すると、サンプルプログラムが表示されます。「ツール」⇒「シリアルポート」⇒「/dev/ttyUSB0(環境によって変わります)」でシリアルポートを選択した後、「ツール」⇒「シリアルモニタ」でシリアルモニタを起動しておきます。
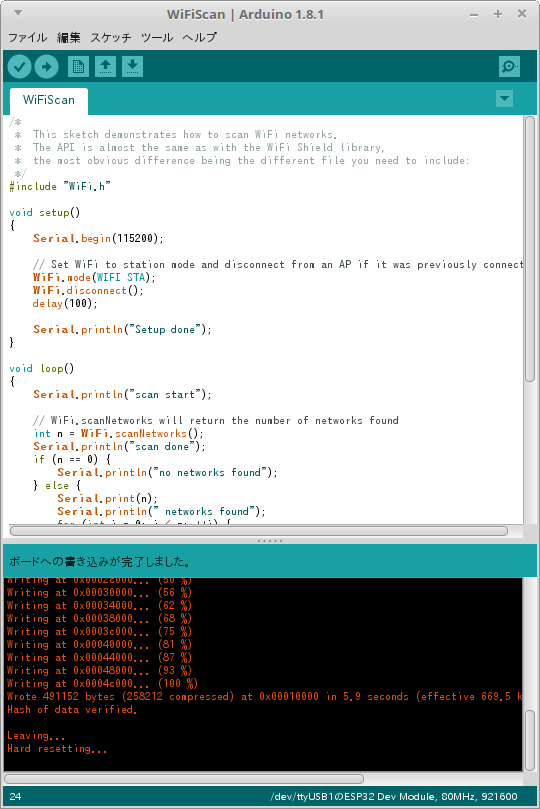
準備ができたら「⇒」ボタンをクリックして、書き込んでみます。「⇒」をクリックする際にはIO0に接続したタクトスイッチを押しながらクリックすることでダウンローダを起動します。「Wrting … 」という表示が出たら、タクトスイッチのボタンを離します。
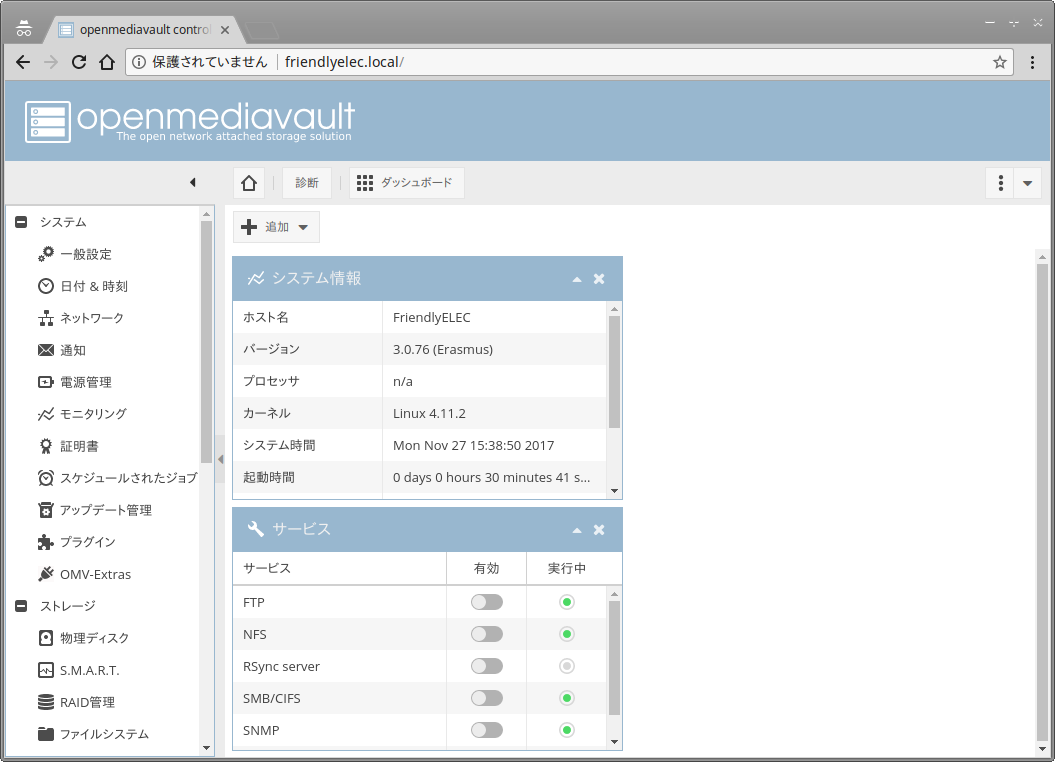
書き込み完了後はこんな感じ。
![]()
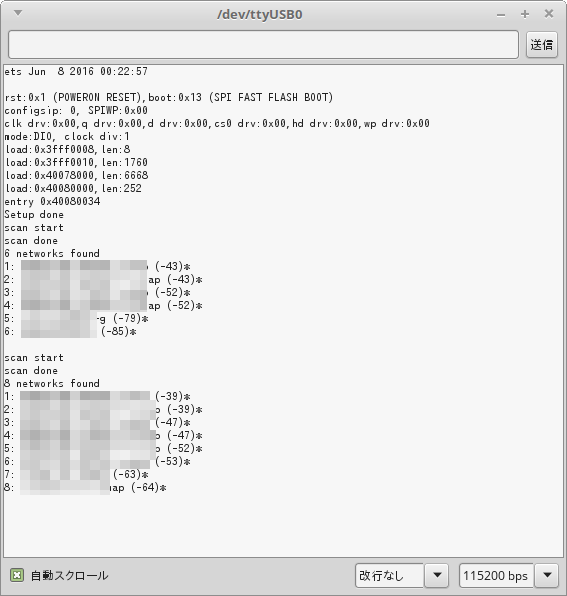
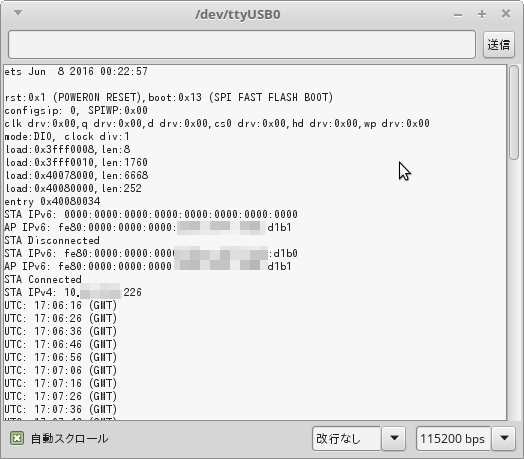
書き込みが終わると、シリアルモニタの方に表示が始まります。
![]()
こんな感じでSSIDのリストが表示されれば成功です。